-
칼만 필터 Kalmanfilter 의 이해-2편Autonomous Driving 2024. 1. 27. 16:42
이 편이 칼만필터의 시스템 모델에 대해서 설명할 것이다.
사실 이 부분이 칼만 필터의 핵심이다.
즉 칼만필터를 이해하기 위해서는 시스템 모델을 이해해야한다.
그리고 측정 값과 시스템 모델의 관계도 이해해야 한다.
참고로 해당 글을 참조 했음을 알려둔다.
https://note.yongcong.wang/Self-Driving/Prediction/imm-for-prediction/
Interacting Multiple Models(IMM) for Prediction - Notebook
Interacting Multiple Models(IMM) for Prediction For self-driving vehicle, it's important to reliably predict the movement of traffic agents around ego car, such as vehicles, cyclists and pedestrians. We have many neural networks to predict obstacle on lane
note.yongcong.wang
시스템 모델설계 방식과 측정 값과 시스템 모델의 관계에 따라서 선형 칼만 필터와 비선형 칼만 필터로 구분 된다.
두 부분이 다 선형이면 선형 칼만 필터이고
시스템 모델과 측정 값과 시스템 모델과의 관계 2개 중 하나가 선형이 아니면 비선형 칼만 필터가 된다.
비선형 칼만 필터를 푸는 방식에는 대표적으로 Extended Kalman Filter와 Uncented Kalman Filter가 있지만
난 Uncented Kalman Filter를 선호한다. 이유는 Jacobian 즉 편미분을 하지 않아도 되기 때문에
비선형 칼만 필터를 설계할때는 Uncented Kalman Filter를 선호함.
이제 시스템 모델에대해서 이해해보자
1. 선형 칼만 필터
일반적인 칼만 필터의 공식은 아래와 같은데
추정 값 계산 : $ X_k = A*X_{k-1} $
오차 공분산 계산 : $ P_k = A*P_{k-1}A^T + Q $
칼만 이득 계산 : $ K_k = P_k*H^T*(H*P_k*H^T + R)^{-1}$
추정 값 업데이트 : $ X'_k = X_k + K_k(z_k - H*X_k) $
오차 공분산 업데이트 : $ P'_k = P_k - K_k*H*P_k $
선형 vs 비선형 구분 기준?
A, H 을 상수로 구현할 수 있으면 시스템이 a + b + c 같은 선형 시스템이라는 의미므로 선형 칼만 필터이다.
그러나 A, H matrix를 상수로 구현할 수 없으면 선형 시스템이 아니다.
자율 주행에서 CV((Constant Velocity)), CA((Constant Acceleration)), CT((Constant Turn rate)) 3개의 모델이 자주 사용되는데
판단 해보자!
측정 값은 x,y position 이라고 가정하면
CV((Constant Velocity)) model은 아래처럼 구현 할 수 있음. dt 는 상수이므로 모든 값이 상수이다. 그러므로 선형 칼만 필터이다.
시스템 변수 A H \begin{bmatrix}
X \\
V_x \\
Y \\
V_y \\
\end{bmatrix}\begin{bmatrix}
1&dt& 0& 0 \\
0&1 & 0& 0 \\
0&0 & 1& dt \\
0&0 & 0& 1 \\
\end{bmatrix}\begin{bmatrix}
1 \\
0 \\
1 \\
0 \\
\end{bmatrix}즉 모든 행렬의 값이 상수로 구현되어 있는것을 알 수 있음.
그럼 다음으로 CA((Constant Acceleration)) model을 생각해보자!!
밑의 A, H도 상수로 표현 되므로 밑의 시스템도 선형 칼만 필터로 구현 가능하다.
시스템 변수 A H \begin{bmatrix}
X \\
V_x \\
A_x \\
Y \\
V_y \\
A_y \\
\end{bmatrix}\begin{bmatrix}
1& dt & 0.5*dt^2& 0 & 0 & 0 \\
0& 1 & dt & 0 & 0 & 0 \\
0& 0 & 1 & 0 & 0 & 0 \\
0& 0 & 0 & 1 & dt & 0.5*dt^2 \\
0& 0 & 0 & 0 & 1 & dt \\
0& 0 & 0 & 0 & 0 & 1 \\
\end{bmatrix}\begin{bmatrix}
1 \\
0 \\
0 \\
1 \\
0 \\
0 \\
\end{bmatrix}참고로 A는 state transition matrix 라고 부르고
H 는 observation matrix 라고 부른다.
A는 시스템 모델을 의미하고 H는 측정값을 시스템 모델과 연결 시켜주는 역할을 하는 matrix다.
이제 마지막으로 CT((Constant Turn rate)) model을 보자
나도 이 모델을 다룰때 선형인지 비선형인지 헷갈렸다.
이유는 yaw rate을 어떻게 정의하느냐에 따라서 선형과 비선형 칼만 필터를 왔다 갔다 하기 때문이다.
만일 차량의 yaw rate으로 매번 사용한다면 밑의 A matrix는 상수가 된다.
혹은 위에 링크된 예제에서는 고정된 값으로 사용하고 있어서 상수이므로 선형 칼만 필터로 설명하고 있다.
그러나 실제 타겟의 yaw rate값을 이용해서 구현 하고 싶다면 A matrix는 상수가 아니므로 선형 칼만 필터를 사용 할 수 없다.
그래서 실제 target의 yaw 를 사용하면 비선형 칼만 필터로 EKF 혹은 UKF를 사용해야한다.
시스템 변수 A H \begin{bmatrix}
X \\
V_x \\
Y \\
V_y \\
\dot{\theta}(yaw\;rate) \\
\end{bmatrix}\begin{bmatrix}
1 & \frac{sin(\dot{\theta} * dt)}{\dot{\theta}}& 0 & -\frac{1-cos(\dot{\theta} * dt)}{\dot{\theta}}& 0 \\
0 & cos(\dot{\theta} * dt)& 0 & -sin(\dot{\theta} * dt)& 0 \\
0 & \frac{1-cos(\dot{\theta} * dt)}{\dot{\theta}} & 1 & \frac{sin(\dot{\theta} * dt)}{\dot{\theta}}& 0 \\
0 & sin(\dot{\theta} * dt)& 0 & cos(\dot{\theta} * dt)& 0 \\
0 & 0 & 0 & 0 & 1
\end{bmatrix}\begin{bmatrix}
1 \\
0 \\
1 \\
0 \\
0 \\
\end{bmatrix}사실 비선형 칼만 필터를 사용할때는 위 처럼 시스템 모델을 가져가지 않는다.
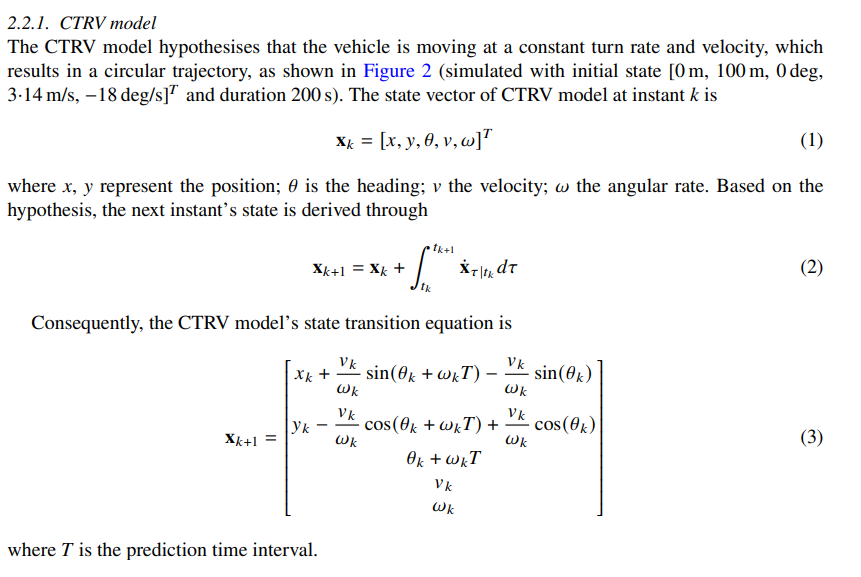
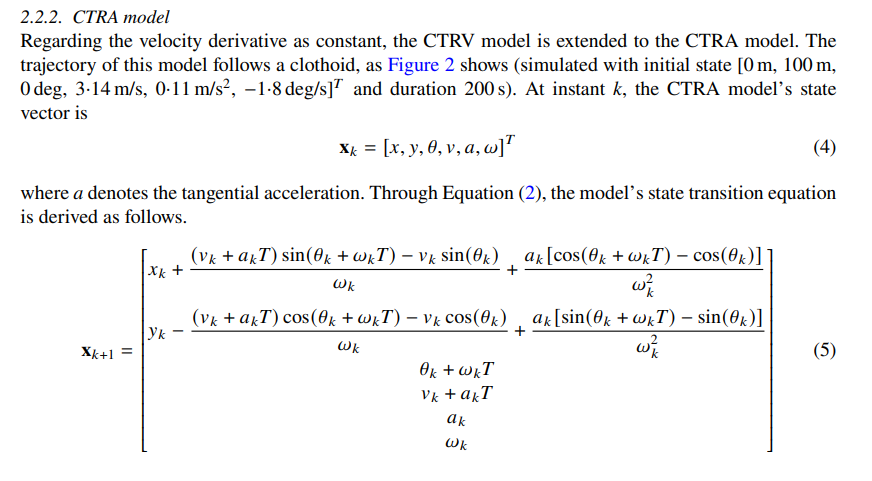
CTRV 혹은 CTRA라고 하는데
찾아보니 아래 논문이 잘 나왔있다.
논문 제목 : Comparative evaluation of Kalman filters and motion models in vehicular state estimation and path prediction
링크 주소 :
논문에서 설명하는 시스템 모델 수식은 아래 처럼 잘 설명되어 있다.
논문에서는 EKF를 사용하고 있지만 내 생각에는 UKF가 더 좋을 것 같다.
그리고 마지막으로 그림이 좋아서 Udacity의 강의 자료인데 그림이 좋아서 가져와 봤다.
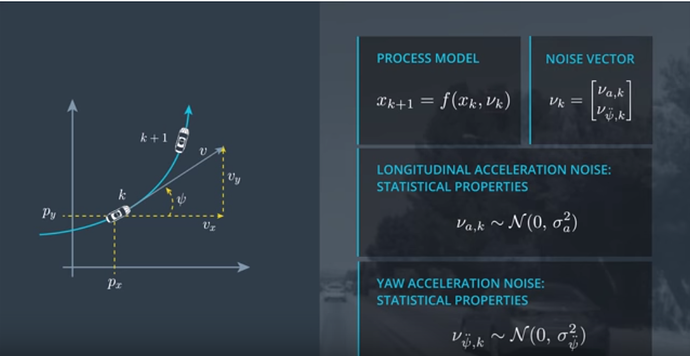
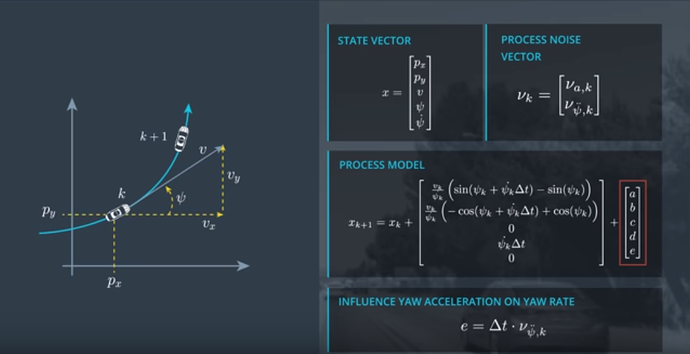
내가 볼때 비선형 칼만 필터 구현시 가장 중요한 Ucented Kalman Filter에 대해서는 시간될때 적어 보겠다.
사실 별거 없고 따라하면 된다. 단 어떻게 비선형 모델에서 공분산 값을 추출하는 지만 이해하면 된다.
다음 편은 내가 참조했던 사이트를 참조해서 IMM Kalman Filter에대해서 설명할 예정이다.
반응형'Autonomous Driving' 카테고리의 다른 글
칼만 필터(Kalman filter)의 이해-3편(Interacting multiple mode Kalman Filter) (1) 2024.01.13 칼만 필터(Kalman filter)의 이해-1편 (0) 2024.01.05 Multi-task Learning with Localization Ambiguity Suppression for Occupancy Prediction by 42 dot team (1) 2023.07.09 VERY DEEP CONVOLUTIONAL NETWORKSFOR LARGE-SCALE IMAGE RECOGNITION 논문 번역 (0) 2023.07.05 CVPR23 - Tesla (0) 2023.06.29